
В августовском номере шла речь об особенностях использования навигационных систем параллельного и автоматического вождения. Как это применяется в нашем опыте ЦТЗ на примере предыдущих лет исследований?
В табл. 1 представлены данные трёхлетних исследований величин стыковых междурядий при посевах различных культур по маркеру и с использованием системы «Автопилот» в РГАУ — МСХА имени К.А. Тимирязева.

Примечание. Ширина междурядий сеялок D9-30 — 12 см, DMC — 18,75 см.
Посев зерновых культур (озимой пшеницы и ячменя) проводился в одном случае по автопилоту, в другом по маркеру.
При этом посев озимой пшеницы и ячменя на отвальном фоне осуществлялся рядовой сеялкой D-9-30 Amazone (далее по тексту D-9-30) с применением системы «Автопилот» и маркера. По варианту нулевой (без обработки) и минимальной обработок почвы проводился посев пневматической сеялкой прямого посева DMС Primera-3000 Amazone, (далее по тексту DMC) только с использованием автопилота. Посев вико-овсяной смеси проводился двумя сеялками: D9-30 на вспашке, DMС на нулевом варианте, только с применением автопилота.
В ходе исследований наблюдалась неодинаковая ширина стыковых междурядий между смежными проходами сеялок при посеве зерновых культур и вико-овсяной смеси по маркеру и автопилоту. Так, в 2008 г. сеялкой D9-30 высевали ячмень по варианту отвальной обработки почвы. При этом получены отклонения значений стыковых междурядий от стандартной ширины междурядий, предусмотренных конструкцией сеялки, в случае посева ячменя по маркеру 3,4 см, с использованием автопилота — 1,5 см.
Несмотря на сравнительно хорошие средние значения отклонений (0,63 и 2,98 см в первом повторении и 1,59 и 2,68 см во втором соответственно), посев ячменя по маркеру показал большее расхождение в параметрах стыковых междурядий — от +13,75 см до — 9 см. Такая нестыковка междурядий может иметь негативное значение, особенно при выращивании пропашных культур. При использовании системы «Автопилот» таких существенных отклонений не наблюдалось. Что же касается работы автопилота на отвальном и минимальном фоне, то отклонения на последнем имеют меньшие значения, так как на более плотной почве легче осуществляется управление трактором.
В 2010 г. несоответствия в ширине стыковых междурядий для отдельных культур проявились следующим образом. У озимой пшеницы при посеве по отвальной обработке D9-30 по маркеру получено расстояние между смежными проходами сеялки 5 см, у ячменя — 3,2 см. При посеве по автопилоту получены результаты: 1,5 и 1,2 см соответственно. Для вики с овсом эта величина равнялась 1,7 см. Отклонения при посеве этих культур сеялкой DMС с использованием системы GPS составили: для озимой пшеницы — 1,4 см; ячменя — 0,7 см; вики с овсом —0,3 см. При ширине междурядий сеялки 18,8 см данные несоответствия вполне допустимы.
Необходимо отметить ещё одно важное достоинство системы «Автопилот» по сравнению с маркером. При работе по системе нулевой обработки почвы след от маркера, особенно в сумерки, не очень хорошо виден. «Автопилот» же позволяет работать в круглосуточном режиме. Одно это обстоятельство может существенно повысить эффективность работ в сельском хозяйстве: два механизатора могут работать по очереди на одном тракторе без перерыва 24 часа в сутки и проводить посевную в кратчайшие и лучшие агротехнические сроки (рис. 3).
На пропашных культурах, помимо точной посадки, требуется проведение междурядных обработок. Поэтому при использовании навигационных систем необходима высокая точность ведения агрегата.
В ходе экспериментов была предпринята попытка адаптировать систему «Автопилот» под междурядную обработку картофеля. Под картофель был выбран участок на склоне, чтобы сделать работу автопилота более сложной (рис. 4). В компьютер системы «Автопилот» в задание для гребнеобразователя были загружены траектории, пройденные картофелесажалкой.
Автопилот без труда справлялся с такими задачами, которые обычному механизатору было бы выполнить очень тяжело, так как трактор стаскивало вниз по склону. Системе «Автопилот» удавалось подруливать трактор, движущийся практически боком. Как результат – идеально прямолинейные гребни и дружные последующие всходы даже на склоне (рис. 5).
Посадка картофеля осуществлялась картофелесажалкой GL-34T по автопилоту и по маркеру. Заданная траектория движения агрегата, с использованием системы GPS, повторялась на варианте точного земледелия в ходе проведения гребнеобразования по всходам картофеля. По традиционной технологии возделывания картофеля этот прием проводился визуально, т.е. движением агрегата управлял механизатор (рис. 6).
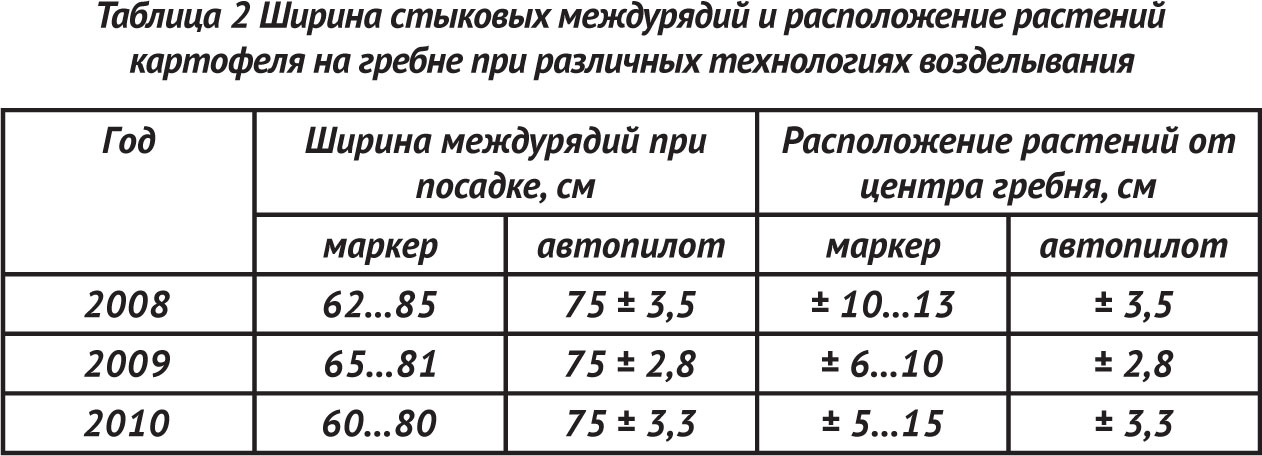
Ширина междурядий между проходами картофелесажалки при использовании маркера и автопилота отличалась по отдельным годам незначительно, составляя по традиционной технологии интервал в среднем от 60…65 до 80…85 см, т.е. отклонение от стандартного междурядья сажалки (75 см) находилось в пределах от — 15 до + 10 см. Применение системы «Автопилот» обеспечивало отклонение от прямолинейности смежных рядков от 2,8 до 3,0 см (табл. 2).
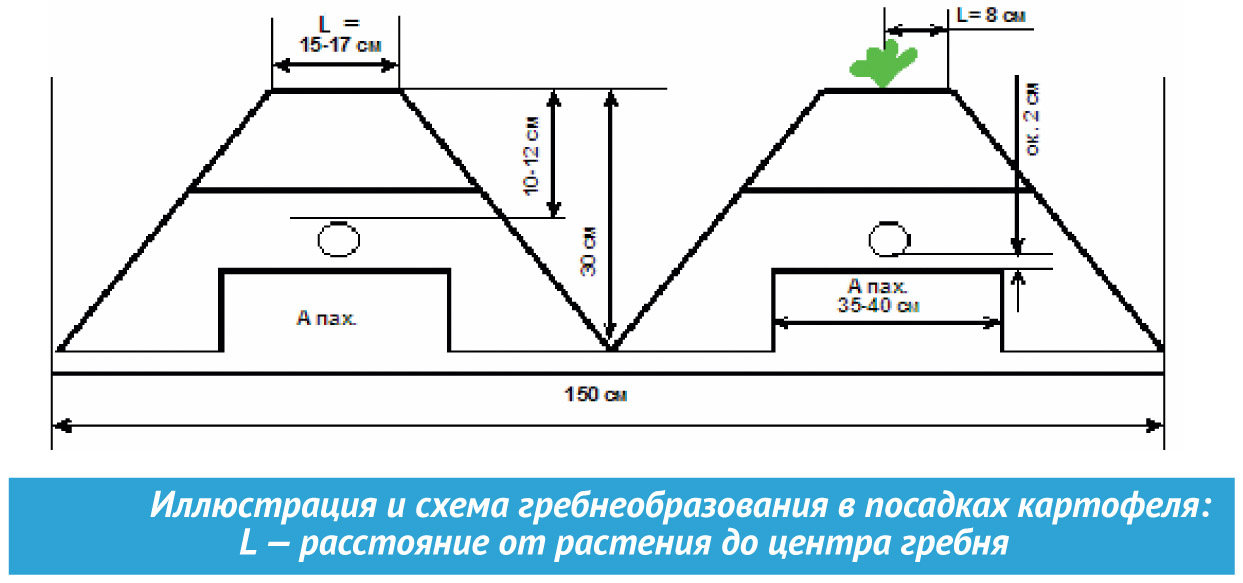
Важным условием развития полноценного растения картофеля является его расположение по отношению к центральной части гребня, формируемое в ходе проведения гребнеобразования после появления всходов. Гребнеобразование в посадках картофеля, возделываемых по традиционной технологии, обеспечивало формирование растений картофеля с отклонениями от центра от 10 до 15 см. Это приводило к одностороннему изменению нарастания вегетативной части, неравномерности в образовании и развитии подземных клубней, а главное, к снижению качества продукции из-за появления большого количества зеленого картофеля.
При применении технологии точного земледелия растения картофеля располагались по центру рядка с отклонением от 2,8 до 3,5 см. Сочетание двух проходов агрегата по полю, а именно, посадки и гребнеобразования картофеля представлены в табл. 3.
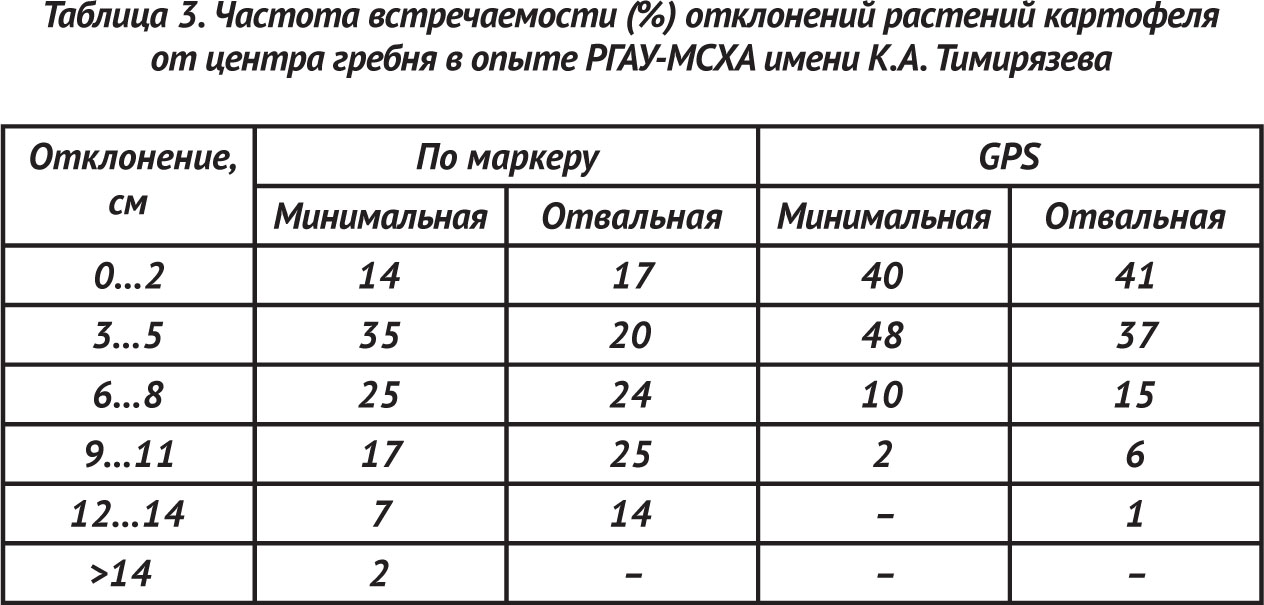
Проведение обработок с применением автопилота на основе системы GPS, с корректировкой сигнала в режиме реального времени, показывает высокую точность. Так, на вспашке критические отклонения свыше 8 см составили 7 % случаев, на минимальной обработке — 2 %. При посадке по маркеру и глазомерном гребнеобразовании критические отклонения встречаются чаще, соответственно в 39 и 26 % случаев.
Таким образом, при работе с пропашными культурами к системе ГЛОНАСС и техническим средствам автоматического ведения МТА предъявляются следующие требования: ведение агрегатов в реальных полевых условиях из-за наложения одного прохода на другой должно достигать точности в отклонениях каждого прохода не более ± 4 см по рабочим органам в 95 % случаев. В настоящее время такую точность обеспечивает система GPS с применением дополнительной базовой станции.
Необходимо отметить, что кроме высокоточной системы обработки спутниковых навигационных сигналов необходима соответствующая автоматическая система управления трактором, так как ни один механизатор вручную не в состоянии обеспечить требуемую точность движения. Скажем, компания John Deere уже на заводах устанавливает на свои тракторы системы типа «Автопилот». Есть и другие системы подруливания, реагирующие на соответствующие навигационные сигналы. Можно установить сервопривод на рулевое управление трактора, который тоже будет автоматически управлять движением машины. Однако установка такого сервопривода на серийный трактор МТЗ-1221 не имела успеха из-за очень «тугого» руля (усилия поворота на руле): электронная система воспринимала данное усилие как попытку человека взять управление «на себя» и автоматически отключалась. Сейчас на Минском тракторном заводе начат выпуск тракторов с гидравликой производства фирмы Bosch (Sauer-Danfoss) и теперь, возможно, удастся оснастить их соответствующими системами подруливания.
Тенденция на сегодняшний день такова, что, без сомнения, за системами параллельного вождения и автопилотами будущее современного сельскохозяйственного производства.
Балабанов В.И., Березовский Е.В., Беленков А.И., Железова С.В.
Российский государственный аграрный университет – МСХА имени К.А. Тимирязева
"Нивы Зауралья" №10 (132) НОЯБРЬ 2015
.gif)

.gif)
Нет комментариев. Ваш будет первым!